辨析:AlphaGo有好几个版本,按照时间顺序:AlphaGo Fan(即AlphaGo paper),AlphaGo Lee,AlphaGo Master,AlphaGo Zero(下文中有时会称之为Zero, this paper),AlphaZero(后续工作,Science Paper)。他们之间的区别参见 这篇论文的附录。
引子 & 总结
AlphaGo 确实超越了顶尖人类棋手(AlphaGo Lee 4:1打败了李世石),但是,AlphaGo无论是在成绩上还是算法上,还有很大的提升空间。
从成绩角度来谈,成熟的围棋AI需要对人类有绝对100%的胜率,而不是负于李世石一盘。
至于AlphaGo的算法,从我的角度来看,最不自然的一点,就是train test的流程 不一致。按照深度监督学习的观点,如果想模型在测试集上的表现尽可能接近训练集上的表现,需要保证测试的流程和训练一致,否则会严重损害模型性能。然而,在AlphaGo的训练阶段,没有MCTS的参与。
此外,现在深度学习追求的是end2end,而AlphaGo的training pipeline显得不够elegant。
最后是这篇文章所强调的核心,Mastering without Human Knowledge。用DL的话讲,就是不需要监督学习预训练和围棋专家数据集,只用强化学习的技术。
于是 AlphaGo Zero的算法相比于AlphaGo有了以下提升:
- 保证了train test 的一致性,都包含了APV-MCTS
- 抛弃了pipeline,用一个网络代替了所有网络
- 移除了MCTS中的rollout阶段,完全由 value network决定。
- 用 MCTS 提升 policy network 输出的action probability,并作为 label,训练policy network。
算法
Zero 的 训练方式可以看作是 off-policy的,一边在与环境交互(self-play)并把样本存入一个replay memory中;一边在做神经网络的训梯度下降(optimization)。
所以,算法由2部分构成:self-play, optimize(sgd)。还有一个相对不太重要的部分为 Evaluation。三个部分之间是并行执行的。
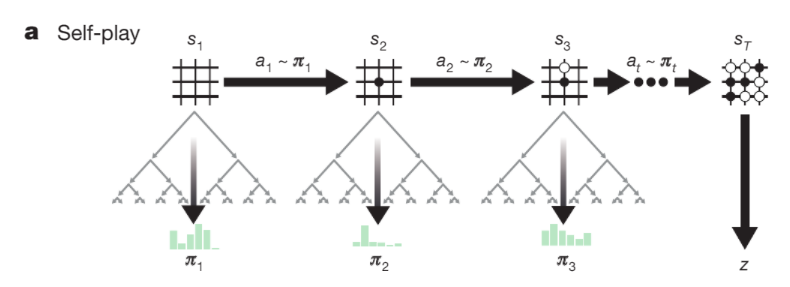
1. Self-play with MCTS
Self-play的目的是在为 optimize阶段生成训练数据。
和AlphaGo APV-MCTS的区别: 如果我对附录中的search algorithm理解没错的话,这部分和AlphaGo基本没有区别,除了省略了rollout(下式中 $\lambda = 0$ ,只根据value network 的输出来确定叶子结点的value)以及expand的方式。
具体的Self-play流程:
- 在每个state $s_t$ 处 执行MCTS,MCTS的每次simulation重复以下步骤:
selection: (与AlphaGo中完全一样),用下式选出best edge/action:
expand: (与AlphaGo中不同,总是expand)重复selection直到叶子节点,扩张。利用 current best network计算出 $P(s,a)$ 作为edge 的先验概率。
rollout: 无。
backup: (与AlphaGo中完全一样)利用 current best network计算出 叶子节点的 value $V(s^{\prime})$,对从root到叶子节点上的这条path上的所有结点更新 $Q, N$。
- MCTS结束之后,在root处,获取每个edge的 $N(root,a)$,并计算该action 的 概率 $\pi_a$:
所有action 的概率组成了一个向量 $\pi_t$ ,则当前这个state的transition为 :$(s_t, \pi_t , z_t)$。其中 $z_t$ 的值只有当这一盘围棋结束后才得知。
- 当前state的动作 $a_t$ 采样于 $\pi_t$,和 (stocastic) Policy Gradient 中action 的获取方式一致:
- 当这一盘围棋结束之后(黑或白胜),得到 reward $z = \pm1$,则这一盘围棋的所有transition 的 $z_t = z$,并将所有transition $(s_t, \pi_t , z_t), t = 0,1,2,….$ 全放入Replay memory中。Memory 大小为 500,000,淘汰最旧的。
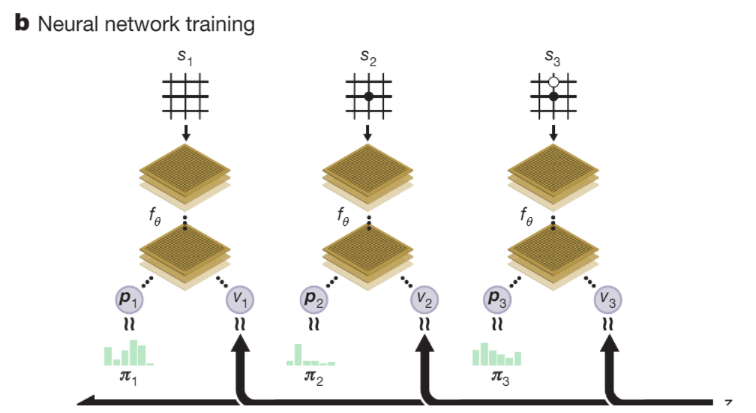
2. Optimize with replay memory
这部分比较简单:
sample uniformly from replay memory.
X = $s_t$ 。对于 policy 分支,Y = $\pi_t$ , 损失函数为cross entropy,对于 value 分支,$Y = z_t$ ,损失函数为 平方误差函数,再加上 L2 norm:
注:一般如果有两个branch,它们之间的loss会由一个超参进行调节,比如:
在这篇论文附录里提到了,$\lambda = 1$ 即 两个loss权重一样。
利用mini-bach SGD训练网络。
3. Evaluation
每1000次 mini-BSGD之后,会存一个checkpoint a 。由于网络训练有波动,需要确保用最好的网络self-play生成训练数据。于是,作者让 a 和 current best network进行400局对弈,如果a胜出55%,则current best network = a。
同时,Evalutaion可以一直跟踪checkpoint的表现,保证网络不会diverge。
不过,在后续工作AlphaZero中,作者移除了400局对弈这一步,直接current best network = a。
网络结构
从AlphaGo中的4个网络,简化成了1个网络,输入为棋局(以及过去几步的棋局,类似于DQN的输入有4帧),共享feature extractor,末端有两个分支,分别为policy branch:输出#actions 的概率;value branch: 棋局的value $V$ 。
相比于AlphaGo中的网络,这篇论文的网络要深一些,并且与时俱进,引入了BN和残差网络。实验部分为了消除网络带来的影响,做了相关的实验,有兴趣的可以看看,这里省略了。
输入相比于AlphaGo减少了一些,为19x19x17。17 = 8(8 most recent position,类似DQN的输入为4帧) + 8(8 most recent position of opponents)+ 1 (which player)
Experiments
1. Evaluation VS AlphaGo
首先,最重要的就是AlphaGo Zero的效果,在围棋里面就是Elo rating。
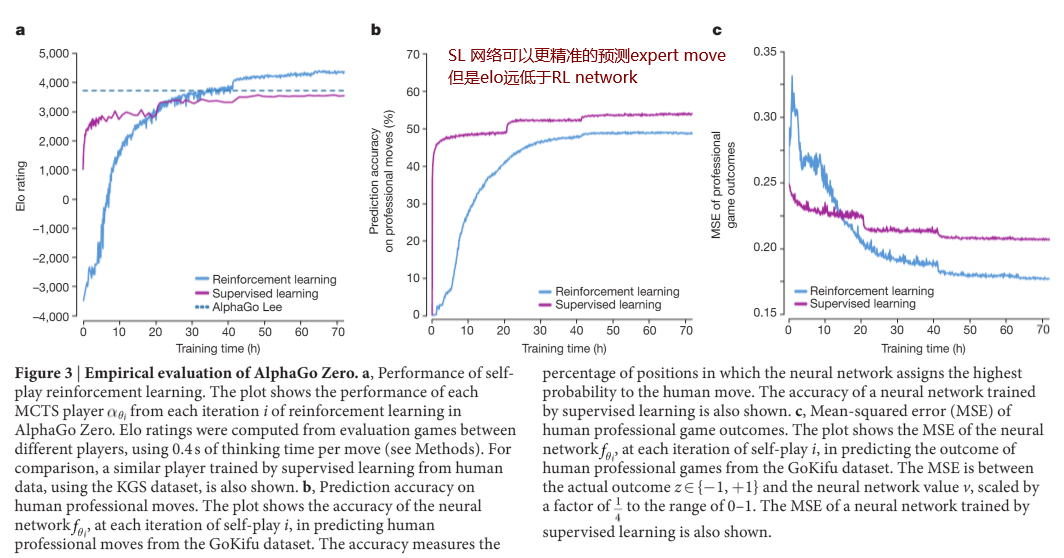
- 图中可以看出AlphaGo Zero的Elo大幅超过了 AlphaGo Lee,这可以说明,AlphaGo Zero确实是比AlphaGo 更好的算法。此外,它们对战时,AlphaGo Zero以100:0的绝对优势胜出。
- 尽管人类棋手数据训练出的 SL network在预测expert move 上更准确,但是Zero 却拥有更高的胜率。这意味着Zero找到了比人类棋手更优的解法。
- Elo 4000+已经远超人类棋手了,目前世界第一的Elo才为 3600分。
2. 不同时期学到的不同Knowledge
Zero训练的总时间为72h,作者展示了在不同训练阶段中Zero进行自我对弈self-play时,所生成的棋局。由于图比较大,这里就不放了。
总的来说,在训练早期,Zero 的策略主要是贪心的,想要尽快围住对面,吃掉对面的棋子;在训练中期,Zero的眼光开始放的比较远,不再纠结于一棋一子的得失。在训练后期,Zero的大局观逐渐形成,打法多变,远超普通人类所能达到的水平。
3. Final Performance
作者最后训练了一个终极版AlphaGo Zero,从29 million盘棋中学习了40天,结果如下:
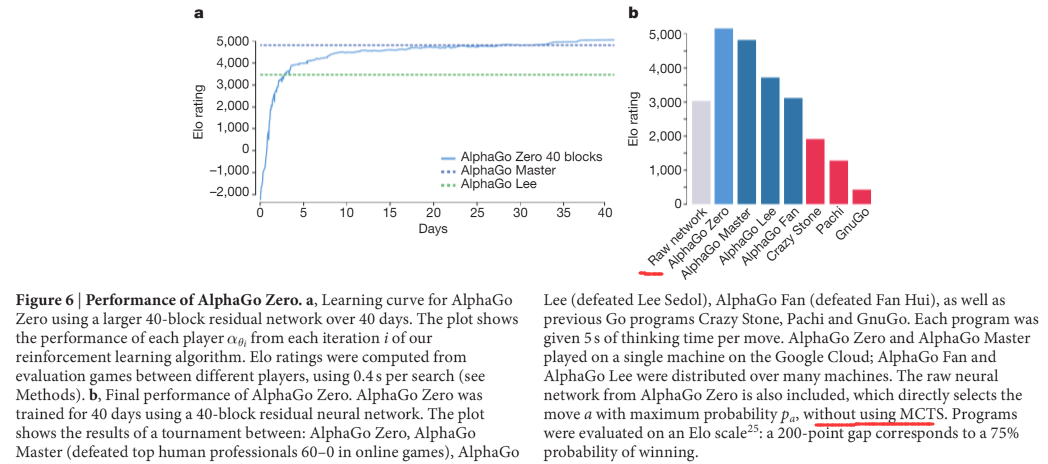
有几点值得注意的:
- 纯端到端 DL 的方法 (raw network)与 DL + MCTS 的方法差距甚远。个人认为,这是因为围棋的可能的position数目过于庞大,不足以生成足够大量的样本让网络充分学习。然而,如果引入MCTS方法,那对于神经网络的要求不需要太高;在MCTS中,会从root向树的深处探索,而处于树深处的state,无论是policy还是value ,相比于root处,网络都会预测的都更精确一些,这使得最终MCTS给出的的 $\pi_t$ 显著优于只使用policy network得出的 action probability。所以,作者称MCTS为 policy improvement operator。
- ELO 达到 5000,训练时间40天。。除了Google估计其他企业以后也不太会继续在围棋上做研究了,除非硬件或深度学习理论层面有革新。
参考资料
[1] AlphaGo
[2] Policy Gradient Therom, NIPS 1999

![[Paper][RL][Nature 2016] AlphaGo: Deep RL 与 Tree Search 的成功结合](/medias/featureimages/6.jpg)