论文:[ICML 2016] Dueling Network Architectures for Deep Reinforcement Learning
引子
如果说Double DQN,Prioritized Replay 是在 算法上对DQN的改进,那Dueling Network就是在网络结构上对 DQN的改进。和DQN相比,只需要将DQN中的网络替换成Dueling Network,其他部分保持不变。
Why Dueling Network work?
- Dueling Network将 $Q$ 的学习拆分为 $V$ 和 $A$ 的学习。不同于 Single Network中每次更新时只有对应action的参数得到了更新,在Dueling Network中,每次更新,$V$ 都得到了更新。$V$ 的学习非常充分,对 $true \ V$ 的拟合也就更好,所以Q-learning 这种 Temporal Difference(TD) 算法的效果也好。
- 对于一个state,可能其 $Q(s,a)$ 的绝对大小较大,但是 $Q(s,a_1), Q(s,a_2)…$ 之间的相差并不大,论文中以 game Seaquest举了例子。如果直接学习 $Q$ ,可能Q的绝对大小学的大差不差,但是 $Q(s,a_1), Q(s,a_2)…$ 之间的大小关系并不容易学习。所以这里将大小关系单独提出来进行学习(即 Advantage Branch)
Algorithm
Dueling Network的网络结构如下,两个branch分别预测 $V(s)$ 和 $A(s,a)$:
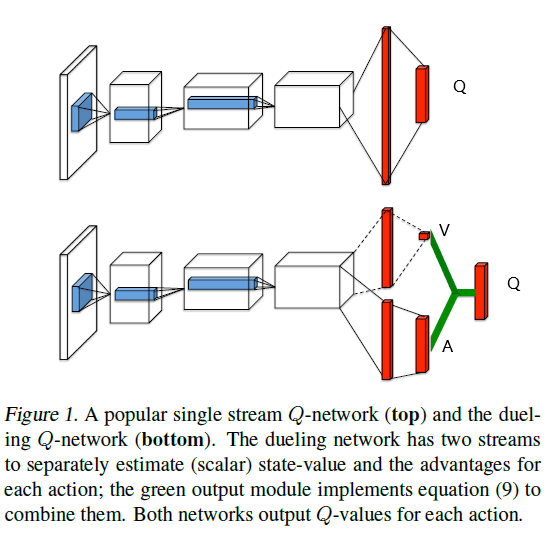
回忆 Advantage 的定义:$A(s,a) = Q(s,a) - V(s)$,似乎可以将Dueling Q-network的output layer构造成两个branch的简单相加:
(注: $\theta$ 为共享卷积层的参数, $\alpha $ 为 branch A的参数, $\beta$ 为 branch V 的参数)
但是作者认为这样是没有意义的(lack of identifiability)。因为,一种最极端的情况是,branch V全部输出0,branch A输出Q,这就退化成了DQN。总的来说,branch V需要知道自己在approximate V,branch A也需要知道自己在approximate A。
作者也做了相关的实验,如果直接这么构造输出层,实际的结果很差。
于是,作者接下来提出了这样来构造output layer:
当 $a = a^$ 时,显然上式中第二项 $ A(s, a ; \theta, \alpha)-\max _{a^{\prime} \in|\mathcal{A}|} A\left(s, a^{\prime} ; \theta, \alpha\right) $ 为0,于是branch V 需要 approximate $Q(s, a^ )$ 即 $V(s)$。
这样一来,branch V 就知道自己在approximate V了。既然branch V 知道自己在approximate V,这也使得了 branch A 知道自己在approximate A了。(这个地方有一点难以理解,反正最终work了)
不过,作者最终使用的是下面这个式子:
它与之前那个式子没有本质上的区别,仅仅是为了提高训练的稳定性 [1] 。
Experiments
Policy Evaluation
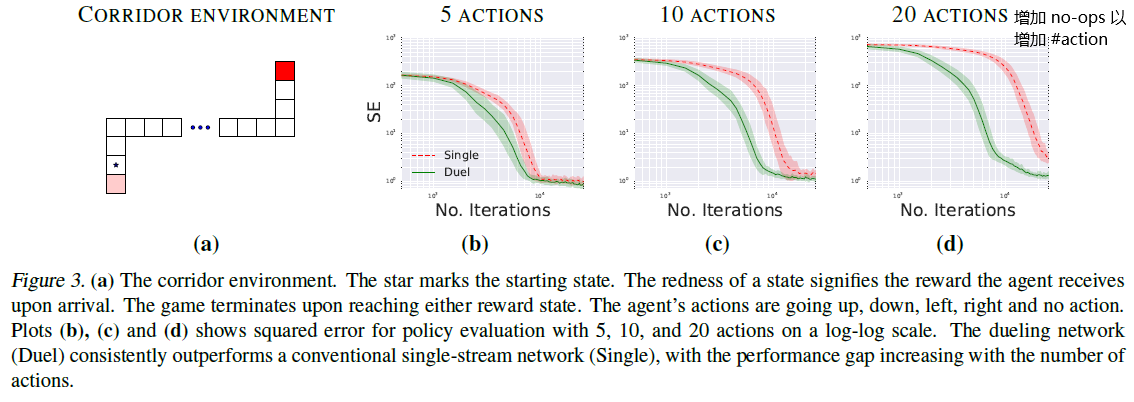
Dueling DQN比DQN优越之处,就是在于 预测 $Q$ 比 single stream(DQN) 更准。 而如何比较谁的 $Q$ 更准,最直接的就是抛开 policy improvement, 比较谁的 Evaluation的结果更精确。
于是作者在一个toy environment(corridor) 做了实验。Dueling Network预测的 $Q$ 与 true $Q$ 相差更小,且收敛更快。当 #action 变大时,这个现象更明显。
Atari
在Atari上的结果如下;
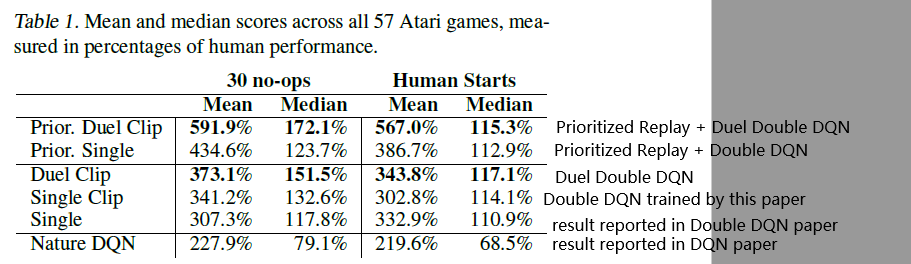
有几点值得注意的:
- We clip the gradients to have their norm less than or equal to 10. 这篇论文发现 gradient clip 尤其的有效。比如表中 Single vs Single Clip,有不小的提升,所以对于所有模型几乎都使用了 Clip。
- Prioritized Replay , Double Q-learning, Dueling Network 可以结合在一起,共同提升结果。
Saliency Map
Saliency Map有多种实现方式[2]。这里采取的是计算 Jacobian 矩阵。
![[Paper][RL][ICML 2017] Distributional RL](/medias/featureimages/4.jpg)
![[Paper][RL][AAAI 2016] Double DQN](/medias/featureimages/9.jpg)