论文地址:ICLR 2016 Prioritized Experience Replay
引子
本篇论文是DQN中Experience Replay的后续工作。
Motivation
The key idea is that an RL agent can learn more effectively from some transitions than from others.
Example: Blind Cliffwalk
论文中用了一个例子来说明不同样本需要不同权重的必要性。
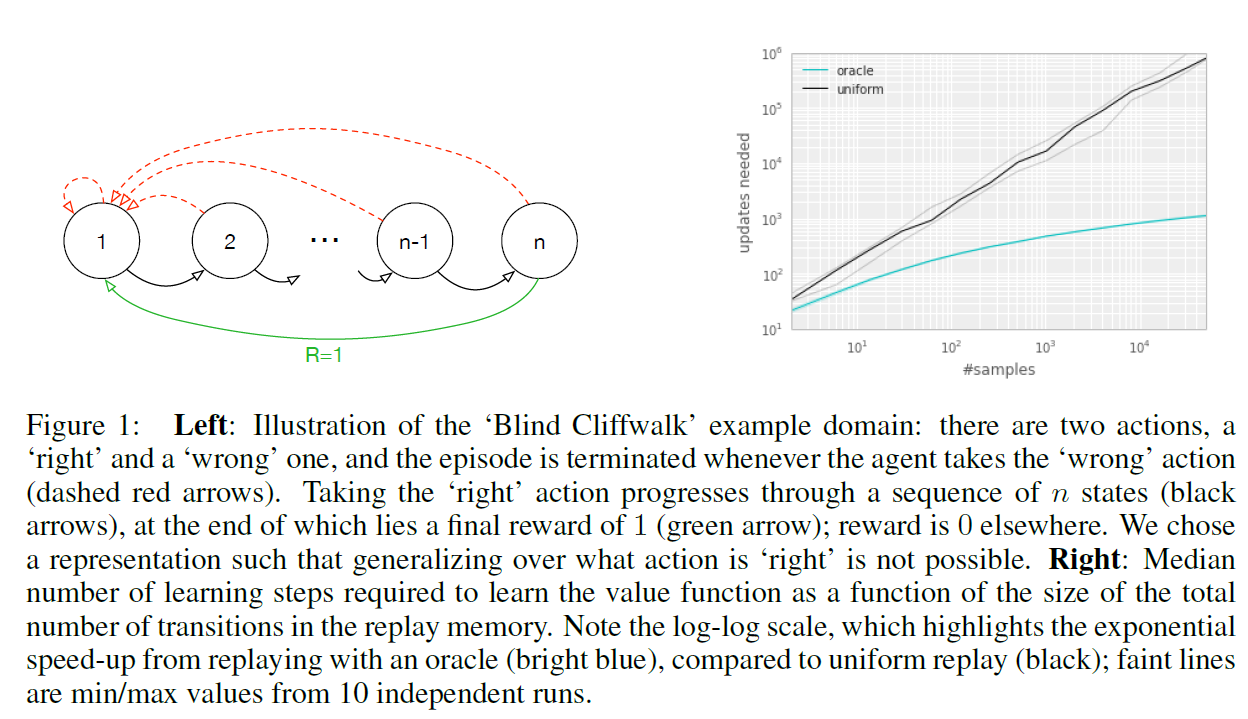
在下图中的 Cliffwalk中,显然,agent只有 $1/2^{n-1}$ 的概率到达终点,所以,replay memory中有大量的雷同的transition,只有极少数到达终点的episode的transition。而这些极少数的transition相对而言更加重要。
(注:这个example的详细setup可以在 Appendix中找到。 由于Cliffwalk的可能的episode个数是有限的,所以replay memory不会进行淘汰,包含了所有可能的episode的transition。对于 n 个 state的Cliffwalk来说,可能的transition个数为 $2^{n+1} - 2$,成功到达终点的transition个数为 $n-1$,如果均匀抽样,选中的概率可以说是非常小了)
下图右展示了最优抽样(oracle)和均匀抽样情况下,Q函数收敛所需update次数与 cliffwalk中state[注1]的个数的关系。显然,两者有数量级的差异。图中折线是多次实验的中位数。
(注1:图中用的是#samples,和#states是等价的,成正比关系,#samples = $2^{n+1} - 2$ , n = #states)
尽管这是个非常极端的例子,也某种程度上说明了 Prioritized Experience Replay 的重要性。
Algorithm
Prioritizing with TD error
这篇论文的核心问题为 如何estimate一个transition的重要性?这时候,可能有人会想到用另一个神经网络来estimate。且慢,有更简单的方法:
One idealised criterion would be the amount the RL agent can learn from a transition in its current state (expected learning progress).
而 the amount the RL agent can learn from a transition 用 TD error 来衡量。$\delta$ 越大,说明 loss 越大,$Q$ network 估计的越不准,被选中的优先级越高。
Stocastic Prioritization
只使用 $\delta$ 作为priority,根据 $\delta$ 的大小逐个选取transition 会产生了一系列的问题。比如:
TD-error要实时更新。可能一开始某个transition的 $\delta$ 很低,但后来$\delta$ 变得很高。如果不实时更新,该transition的优先级一直都很低,永远得不到更新。
然而,Replay memory 的数量级在 $10^6$ ,不可能做到实时更新。$\delta$ 只在transition被放入memory时 或 再次被放入时的 $\delta$ 才更新。
一些其他问题,参见论文。
基于以上问题,不能只根据 $\delta$ 来抽取样本,而是要随机一点。每个transition 被选中的概率:
其中 $\alpha$ 为超参,在Atari 2600中设为 0.6 / 0.7。$p_k$ 为 priority,有两种不同的选择,这两种选择的performance互有好坏,需要按照情况选择。
- Proportional Prioritization : $p_{i}=\left|\delta_{i}\right|+\epsilon$ ,其中 $\epsilon$ 的作用是使 $p_i > 0$
- Rank-based Prioritization : $p_{i}=\frac{1}{\operatorname{rank}(i)}$ rank(i) 为 按照 $\left|\delta_{i}\right|$ 从大到小排序的序号。
看上去 Rank-based Prioritization 的效果应该会更好,但实际上不是,在Discussion部分作者解释为:
we expected the rank-based variant to be more robust because it is not affected by outliers nor error magnitudes. Furthermore, its heavy-tail property also guarantees that samples will be diverse, and the stratified sampling from partitions of different errors will keep the total minibatch gradient at a stable magnitude throughout training.
Perhaps surprisingly, both variants perform similarly in practice; we suspect this is due to the heavy use of clipping (of rewards and TD-errors) in the DQN algorithm, which removes outliers.
上述两者都是 $\left|\delta_{i}\right|$ 越大,$p_i$ 越大。只不过作者认为第二种更robust一点。
Importance Sampling
当我们根据Stocastic Prioritization来采样transition时,high priority的transition会被采样许多次,而low priority的transition会被采样较少的次数。用数学语言来说就是,原本我们uniformly 采样,求得 $\mathbb{E_{\sim uniform}[gradient]}$ ,现在换了一个分布采样,显然会引入bias。
(一个比较容易理解的例子是利用蒙特卡洛积分求曲线下面积,也引入了Importance Sampling修正bias,否则算出的曲线下面积是错误的)
为了修正这点,引入了Importance Sampling:
当 $\beta = 1$ 时,bias完全被修正了。
在论文中采取的是逐步增大 $\beta$ 的操作,从 $\beta = \beta_0$ 逐步增大到 $\beta = 1$ 。
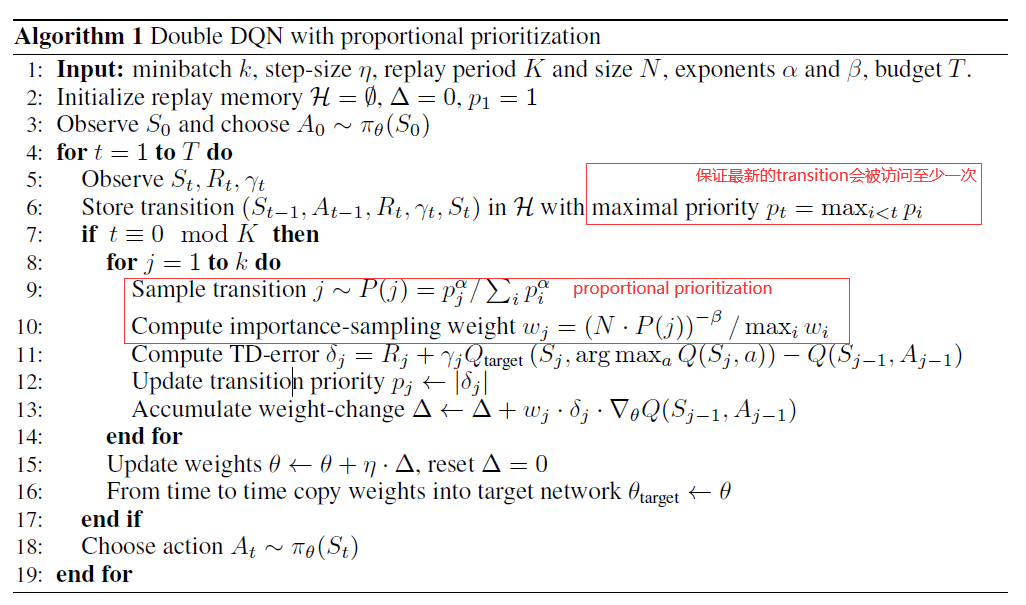
Algorithm: Double DQN with proportional prioritization
论文结合当时的SOTA Double DQN给出了最终的算法,红框中为与 Double DQN 不同的地方 :
Experiment
实验的细节、参数基本和 DQN一致,这里不再赘述,只讲几点比较值得注意的:
- memory 的淘汰方式并不是淘汰 $P(i)$ 最低的,仍然是淘汰最先进入memory的。
- 超参 $\alpha$ = 0.7, $\beta_0$ = 0.5 (只有 $\beta$ 有 annealing)
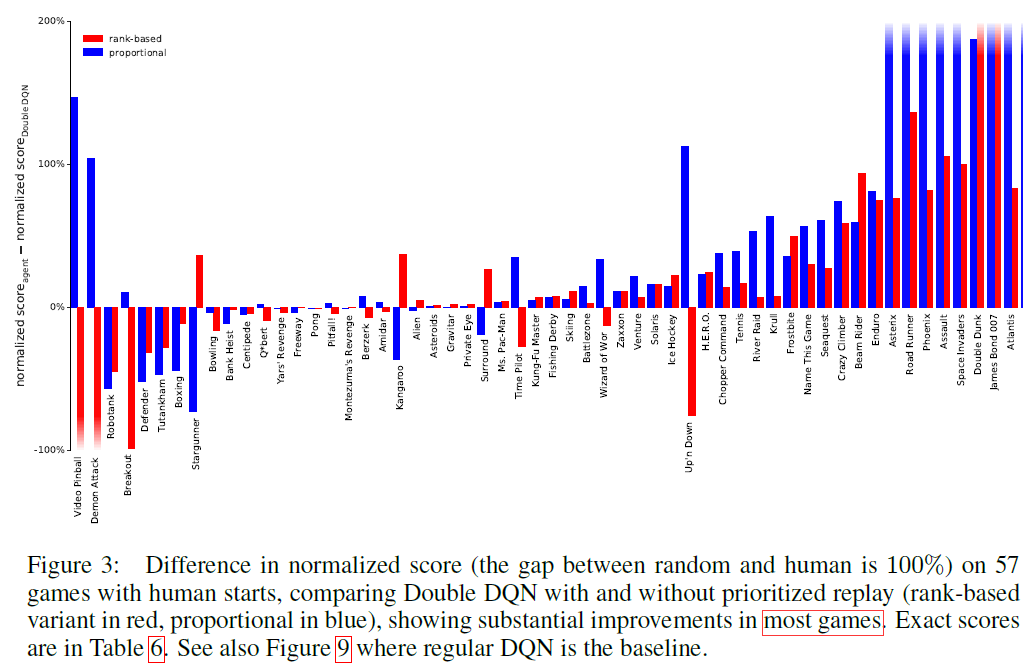
1. Normalized Score
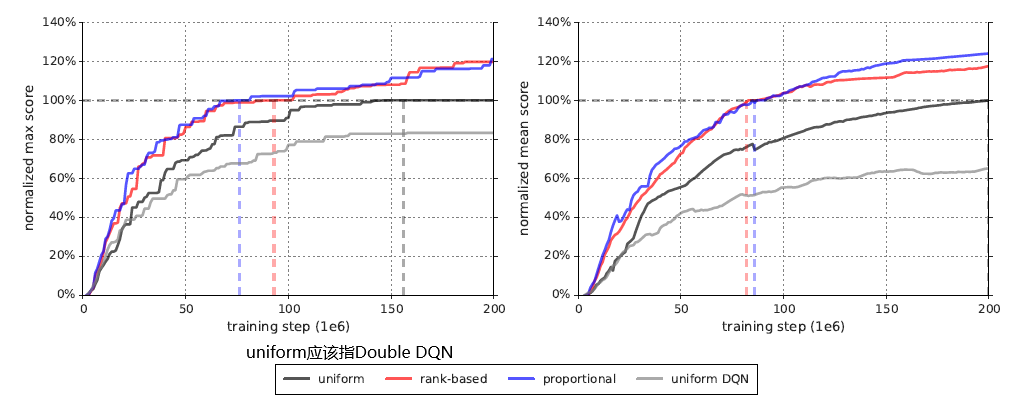
2. Learning speed
Discussion
待补充
Extension
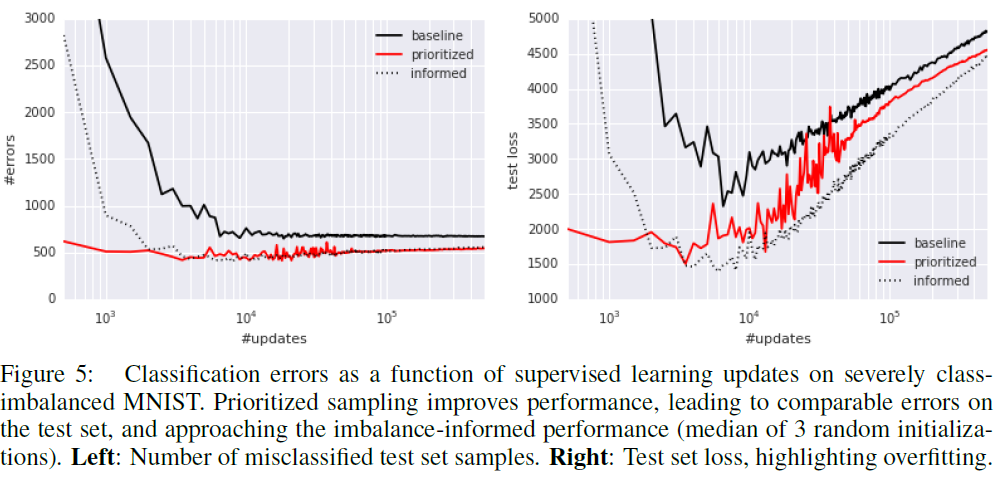
Prioritized Supervised Learning:一般在 Supervised Learning中,由于我们知道各个类的数据量,对于unbalanced的dataset,一般是对数据量少的那一类做data augmentation,使得不同类的数据量持平。不过,假如我们不知道各个类的数据量呢?这篇论文将 Prioritized sampling ( $\alpha$ = 0.7, $\beta$ = 0,no annealing)应用在imbalanced MNIST上:
参考资料
[1] Prioritized-replay-what-does-importance-sampling-really-do
![[Paper][RL][AAAI 2016] Double DQN](/medias/featureimages/9.jpg)
![[Paper][RL][ICML 2016] A3C](/medias/featureimages/3.jpg)